今回の記事ではヘリコプターの得意技である「オートローテーション」を以下の内容で解説します。
・オートローテーションとは?
・オートローテーションができるヘリコプターの仕組み
・オートローテーション中の空力
この記事を読んでオートローテーションの基本について知識を深めましょう。
オートローテーションとは?
オートローテーションの定義は耐空性審査要領に記載されています。
この要領において「自動回転飛行」とは、回転翼航空機が運動中、その揚力を受持つ回転翼が完全に空力のみによって駆動される飛行状態をいう。
耐空性審査要領
オートローテーションは日本語で「自動回転飛行」と言うんですね。
ポイントは「完全に空力のみによって」というところです。
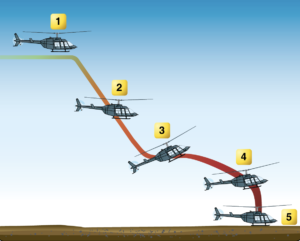
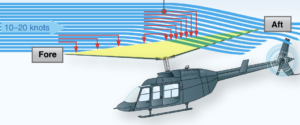
通常の飛行中はローターディスクの上側から空気を取り入れていますが、オートローテーションでは降下によってローターディスクの下側から空気が入ってきます。

通常ヘリコプターはエンジンの出力を使ってローターを回していますがオートローテーションでは空力によってローターが駆動されます。
したがって、ヘリコプターのエンジンが上空で故障したとしてもすぐに墜落するのではなく、オートローテーションによって着陸することができます。
この世に存在する全てのヘリコプターはこのオートローテーションの機能を有しています。
そしてこのオートローテーションを可能にしているのは「フリーホイリング・ユニット(Freewheeling Unit)」という機構です。
フリーホイリング・ユニット(Freewheeling Unit)
フリーホイリング・ユニットは、エンジンの回転数とローターの回転数の関係によってその接続を自動的に切り離すことができるものです。
自転車をイメージしてもらうと分かりやすいと思いますが、人間が漕いでいない間(チェーンが動いていない間)もタイヤは回り続けていますよね?
考え方は自転車と全く同じです。
エンジン故障などによってエンジンの回転数がローターを駆動するのに十分な回転数を下回ってしまうと、フリーホイリング・ユニットによって接続が切り離されローターは回転し続けることができます。
一般的なフリーホイリング・ユニットはエンジンとローターの間に装備されている「スプラグ・クラッチ(One-way Sprag Clutch)」があります。
通常飛行中は内側ドラム(エンジン)が回転し、ローラー(青いやつ)を外側のドラム(ローター)に押し付けてローターを回転させています。
この時クラッチは噛み合った状態になっています。

出典:Helicopter Flying Handbook
エンジンが故障すると内側ドラム(エンジン)の回転数は減少し、ローラーが倒れて外側ドラム(ローター)は回転数を維持できる。
この時クラッチは噛み合っておらずエンジンとローターは完全に切り離されています。
これによりオートローテーションが可能になります。

出典:Helicopter Flying Handbook
メインローターの3つの領域(空力)
ここからはメインローターにかかるオートローテーション中の空力について解説します。
通常オートローテーションは前進速度を持って行う場合がほとんどですが、分かりやすくするために垂直にオートローテーションをした場合について解説します。
下の図は垂直オートローテーション降下中のメインローターです。
見ての通りオートローテーション中のメインローターの空力は、加速領域(Driving Region)・減速領域(Driven Region)・失速領域(Stall Region)の3つに分けることができます。

出典:Helicopter Flying Handbook
下の図は各ブレード領域の力のベクトルを表したものです。
左側のブレードの絵を見て直感的にわかると思いますが、翼端部分と翼根部分は抗力となっておりブレードを回転させようとしているのは真ん中の部分です。
ブレードを回転させようとする自転力とブレードを減速させようとする抗力が釣り合うことでローターの回転数を一定にすることが出来ます。

出典:Helicopter Flying Handbook
加速領域:Driving Region

出典:Helicopter Flying Handbook
加速領域(Driving Region)とは、オートローテーション中にブレード回転させる領域のことで全体の45%ほどを占めています。
図を見てもらうと分かるように、ブレードにかかる空力的な全体の推力(TAF)が軸よりも前を向いています。
つまりブレードには前に進もうとする力が働きブレードを回転させています。
加速領域のことを「オートローテーション領域」と言ったりもします。
減速領域:Driven Region

出典:Helicopter Flying Handbook
減速領域(Driven Region)とは、オートローテンション中ブレードの回転を遅くさせる領域で全体の30%程を占めています。
ヘリコプターのメインローターには捻り下げ(twist)がつけられており、翼端に向けて迎角は小さくなります。
また翼端部は最も相対速度が速いため、その分抗力(Drag)が大きくなります。
結果的にTAFは軸よりも後ろ向きになり、回転を減速させる方向に働きます。
減速領域のことを「プロペラ領域」と言ったりもします。
失速領域:Stall Region

出典:Helicopter Flying Handbook
失速領域(Stall Region)とは、力が発生していない領域のことで全体の25%ほどを占めています。
翼根部分では相対速度が遅く、また迎角が大きすぎるため失速し揚力を生み出せていません。
ここでは抗力のみが発生しているため全体としては、ブレードの回転を遅くする方向に働いています。
前進オートローテーション中の領域

出典:Helicopter Flying Handbook
前進オートローテーション中は機体の前進速度があるため、後退翼側の相対速度が遅くなり加速領域と失速領域は後退翼側に移動します。
また翼根の一部では逆流域(Reverse Flow)も見られます。
回転数のコントロールは3つの領域の面積を変えること
メインローターの3つの領域はブレードのピッチ角や降下率などによって変わってきます。
例えばコレクティブピッチを上げると全ての領域のピッチ角が増加します。
そうすると釣り合いのとれている2つ平衡点はそれぞれブレードのスパンに沿って内側に移動します。
結果、減速領域と失速領域は増加し加速領域は減少するのでブレードを回転させようとする力が弱くなりメインローターの回転数は低下します。
オートローテション中はコレクティブピッチを操作し、加速部分のブレードを加速させる力と減速部分と失速部分の抵抗を釣り合わせてあげることで一定のローター回転数を維持することができます。